Система принципов гпп и их классификация. Принципы
Передаточная функция звена в общем случае представляет собой отношение двух полиномов:
Полином произвольного порядка можно разложить на простые множители k 1 p ; (d 1 p + d 2 ); (d 1 p 2 + d 2 p + d 3 ), поэтому передаточную функцию можно представить как произведение простых множителей или простых дробей вида:
 ;
;
 ;
; .
.
Звенья, передаточные функции которых имеют вид простых множителей или простых дробей, называют типовыми или элементарными звеньями. Элементарные множители, представляющие собой полиномы первого и второго порядка, преобразовываются к стандартному виду, принятому в теории автоматического управления:
 ;
;
 ,
,
k (k 0) - коэффициент передачи ,
T (T 0) - постоянная времени (имеет размерность единицы времени),
- коэффициент демпфирования (затухания) .
Основные типы звеньев делятся на: позиционные, дифференцирующие и интегрирующие.
Позиционными з веньями называются такие звенья, в передаточной функции которых многочлены M (p ) и N (р ) имеют свободные члены.
У дифференцирующих звеньев в передаточной функции отсутствует свободный член числителя, т.е. для однократно дифференцирующих звеньев передаточная функция имеет вид:
 ,
где M
1
(p
)
- свободный член.
,
где M
1
(p
)
- свободный член.
У интегрирующих звеньев в передаточной функции отсутствует свободный член знаменателя, т.е.:
 .
.
1.
Апериодическое звено
.
Стандартная
форма записи уравнения звена:
А
а
)
б
) Рисунок
13. Схемы реализации апериодического
звена
В операторной форме напряжение и ток на выходе для схемы (рис. 13, а ) соответственно равны:
 и
и

 .
.

Рисунок 14. Характеристики
апериодического звена первого порядка
Передаточная функция апериодического звена:
В общем случае передаточная функция апериодического звена имеет вид:
 где: k
= 1, T
= RC
.
где: k
= 1, T
= RC
.
Переходная функция апериодического звена (рис. 14,а ):
 .
.
Весовая функция апериодического звена (рис. 14,б ):

Если характеристики этих функций получены экспериментально, по ним можно определить значения T и k и получить уравнение звена. За длительность переходного процесса принимают время, в течение которого выходная величина достигает 95% ее конечного значения.
Амплитудно-фазовая частотная характеристика (АФЧХ) апериодического звена (рис. 14,в ):
где:
 ,
, .
.
Эта характеристика представляет собой полуокружность с радиусом k /2 и центром с координатами (k /2; j = 0) на действительной оси.
Амплитудно-частотная (АЧХ) апериодического звена:
Фазовая частотная характеристики (ФЧХ) апериодического звена:
Логарифмическая амплитудная частотная характеристика (ЛАЧХ) апериодического звена (рис. 14,г ):
Приближенно ЛАЧХ можно заменить двумя асимптотами, к которым она стремится при → 0 и → . Приближенная ЛАЧХ называется асимптотической .

Обе асимптоты пересекаются в точке, соответствующей = 1/T . Эта частота называется сопрягающей .
На фазовой частотной характеристике (ФЧХ) при → значение φ изменяется от 0 до минус π/2.
2.
Колебательное звено
.
Уравнение
колебательного звена имеет вид:
 .
.
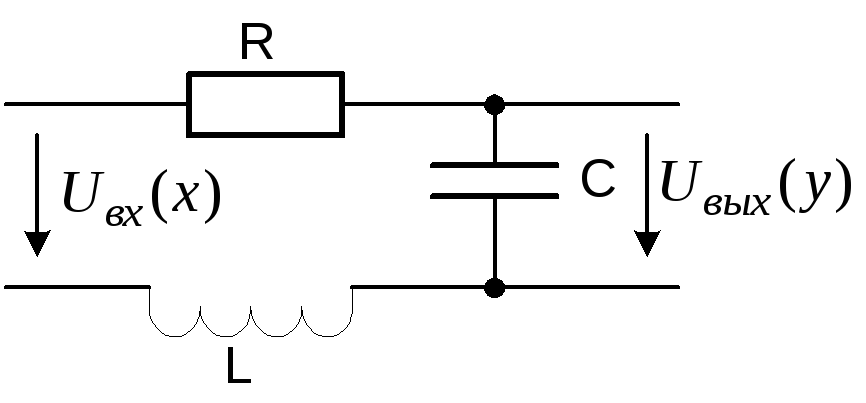 Рисунок
15. Схема реализации
Рисунок
15. Схема реализации
колебательного звена
Оно представляет собой последовательное соединение RLC элементов (рис. 15 ).
В операторной форме напряжение на выходе колебательного звена:
 ,
где:
,
где:
 ,
, .
.
Принято обозначать Т 0 = Т , Т 1 = 2ξТ , тогда передаточная функция колебательного звена имеет вид:
Коэффициент ξ (дзета) называется коэффициентом демпфирования (затухания). Если 0 < ξ < 1, звено называется колебательным; если ξ = 0 (Т 1 = 0), звено называется консервативным , если ξ ≥ 1 - апериодическим звеном второго порядка.
А
Рисунок
16. Характеристики колебательного
звена
В общем случае амплитудно-фазовая частотная характеристика звена (рис. 16,а ):
где k = 1.
Умножив числитель и знаменатель на комплексно сопряженное знаменателю выражение, получим:
Отсюда вещественная и мнимая частотные характеристики колебательного звена:
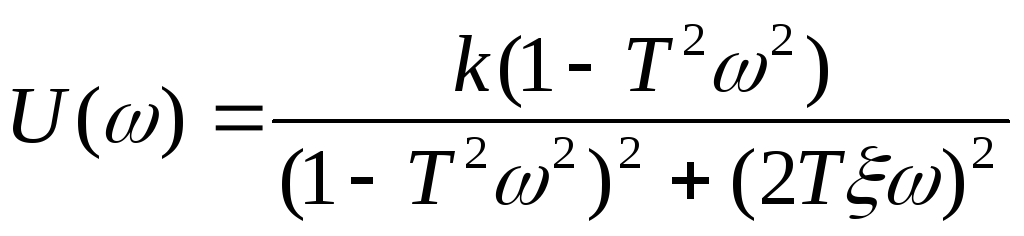 и
и 
Амплитудно-частотная характеристика колебательного звена (АЧХ):

Логарифмическая амплитудно-частотная характеристика (ЛАЧХ) колебательного звена:
При малых значениях
частоты ω<1/Т
= ω
с
в выражении
 можно пренебречь величинойТ
2
ω
2
,
а при значениях частоты ω>1/Т
в выражении
можно пренебречь величинойТ
2
ω
2
,
а при значениях частоты ω>1/Т
в выражении
 можно пренебречь единицей и слагаемым
(2ξТω
) 2 .
Тогда уравнение асимптотической
ЛАЧХ
колебательного звена можно записать:
можно пренебречь единицей и слагаемым
(2ξТω
) 2 .
Тогда уравнение асимптотической
ЛАЧХ
колебательного звена можно записать:

Асимптотическая ЛАЧХ (рис. 16,б ) при ω<1/Т = ω с (ω с - сопрягаемая частота) параллельна оси частот, а при ω ≥ 1/Т имеет наклон минус 40 дБ/декаду. При значениях 0,5<ξ<1 характеристика близка к ломанной линии, если ξ<0,5, то получается заметный «горб», который уходит в бесконечность при ξ → 0. Роль постоянных времени Т 0 и Т 1 в уравнении колебательного звена следующая: постоянная Т 0 - «раскачивает» колебания, а Т 1 - демпфирует их.
Фазовая частотная характеристика (ФЧХ) (рис. 16,б ) изменяется монотонно в интервале от 0 до - :
Переходная функция колебательного звена (рис. 16,в ) при нулевых начальных условиях:
 ,
,
где:
 ;
; ;
; .
.
При
 переходная характеристика представляет
собой график гармонических колебаний.
переходная характеристика представляет
собой график гармонических колебаний.
Весовая функция колебательного звена :

Что такое динамическое звено? На предыдущих занятиях мы рассматривали отдельные части системы автоматического управления и называли их элементами системы автоматического управления. Элементы могут иметь различный физический вид и конструктивное оформление. Главное, что на такие элементы подается некоторый входной сигнал х( t ) , и как отклик на этот входной сигнал, элемент системы управления формирует некоторый выходной сигнал у( t ) . Далее мы установили, что связь между выходным и входным сигналами определяется динамическими свойствами элемента управления, которые можно представить в виде передаточной функции W(s). Так вот, динамическим звеном называется любой элемент системы автоматического управления, имеющий определенное математическое описание, т.е. для которого известна передаточная функция.

Рис. 3.4. Элемент (а) и динамическое звено (б) САУ.
Типовые динамические звенья – это минимально необходимый набор звеньев для описания системы управления произвольного вида. К типовым звеньям относятся:
пропорциональное звено;
апериодическое звено I-ого порядка;
апериодическое звено II-ого порядка;
колебательное звено;
интегрирующее звено;
идеальное дифференцирующее звено;
форсирующее звено I-ого порядка;
форсирующее звено II-ого порядка;
звено с чистым запаздыванием.
Пропорциональное звено
Пропорциональное звено иначе еще называется безынерционным .
1. Передаточная функция.
Передаточная функция пропорционального звена имеет вид:
W (s ) = K где К – коэффициент усиления.
Пропорциональное звено описывается алгебраическим уравнением:
у(t ) = K · х(t )
Примерами таких пропорциональных звеньев могут служить, рычажный механизм, жесткая механическая передача, редуктор, электронный усилитель сигналов на низких частотах, делитель напряжения и др.



4. Переходная функция .
Переходная функция пропорциональное звена имеет вид:
h(t) = L -1 = L -1 = K · 1(t)
5. Весовая функция.
Весовая функция пропорционального звена равна:
w(t) = L -1 = K ·δ(t)




Рис. 3.5. Переходная функция, весовая функция, АФЧХ и АЧХ пропорционального звена.
6. Частотные характеристики .
Найдем АФЧХ, АЧХ, ФЧХ и ЛАХ пропорционального звена:
W(j ω ) = K = K +0 ·j
A(ω
)
=
 =
K
=
K
φ(ω) = arctg(0/K) = 0
L(ω) = 20·lg = 20·lg(K)
Как следует из представленных результатов, амплитуда выходного сигнала не зависит от частоты. В действительности ни одно звено не в состоянии равномерно пропускать все частоты от 0 до ¥, как правило на высоких частотах, коэффициент усиления становится меньше и стремиться к нулю при ω → ∞. Таким образом, математическая модель пропорционального звена является некоторой идеализацией реальных звеньев .
Апериодическое звено I -ого порядка
Апериодические звенья иначе еще называются инерционными .
1. Передаточная функция.
Передаточная функция апериодического звена I-ого порядка имеет вид:
W (s ) = K /(T · s + 1)
где K – коэффициент усиления; T – постоянная времени, характеризующая инерционность системы, т.е. продолжительность переходного процесса в ней. Поскольку постоянная времени характеризует некоторый временной интервал , то ее величина должна быть всегда положительной, т.е. (T > 0).
2. Математическое описание звена.
Апериодическое звено I-ого порядка описывается дифференциальным уравнением первого порядка:
T · d у(t )/ dt + у(t ) = K ·х(t )
3. Физическая реализация звена.
Примерами апериодического звена I-ого порядка могут служить: электрический RC-фильтр; термоэлектрический преобразователь; резервуар с сжатым газом и т.п.



4. Переходная функция .
Переходная функция апериодического звена I-ого порядка имеет вид:
h(t) = L -1 = L -1 = K – K·e -t/T = K·(1 – e -t/T )


Рис. 3.6. Переходная характеристика апериодического звена I-го порядка.
Переходный процесс апериодического звена I-ого порядка имеет экспоненциальный вид. Установившееся значение равно: h уст = K. Касательная в точке t = 0 пересекает линию установившегося значения в точке t = T. В момент времени t = T переходная функция принимает значение: h(T) ≈ 0.632·K, т.е. за время T переходная характеристика набирает только около 63% от установившегося значения.
Определим время регулирования T у для апериодического звена I-ого порядка. Как известно из предыдущей лекции, время регулирования – это время, после которого разница между текущим и установившимся значениями не будет превышать некоторой заданной малой величины Δ. (Как правило, Δ задается как 5 % от установившегося значения).
h(T у) = (1 – Δ)·h уст = (1 – Δ)·K = K·(1 – e - T у/ T), отсюда е - T у/ T = Δ, тогда T у /T = -ln(Δ), В итоге получаем T у = [-ln(Δ)]·T.
При Δ = 0,05 T у = - ln(0.05)·T ≈ 3·T.
Другими словами, время переходного процесса апериодического звена I-ого порядка приблизительно в 3 раза превышает постоянную времени.
3.1.
Динамический режим САУ.
Уравнение динамики
Установившийся режим не является характерным для САУ. Обычно на управляемый процесс действуют различные возмущения, отклоняющие управляемый параметр от заданной величины. Процесс установления требуемого значения управляемой величины называется регулированием . Ввиду инерционности звеньев регулирование не может осуществляться мгновенно.
Рассмотрим САР, находящуюся в установившемся режиме, характеризующемся значением выходной величины y = y o . Пусть в момент t = 0 на объект воздействовал какой - либо возмущающий фактор, отклонив значение регулируемой величины. Через некоторое время регулятор вернет САР к первоначальному состоянию (с учетом статической точности) (рис.24). Если регулируемая величина изменяется во времени по апериодическому закону, то процесс регулирования называется апериодическим .

При резких возмущениях возможен колебательный затухающий процесс (рис.25а). Существует и такая вероятность, что после некоторого времени Т р в системе установятся незатухающие колебания регулируемой величины - незатухающий колебательный процесс (рис.25б). Последний вид - расходящийся колебательный процесс (рис.25в).
Таким образом, основным режимом работы САУ считается динамический режим , характеризующийся протеканием в ней переходных процессов . Поэтому второй основной задачей при разработке САУ является анализ динамических режимов работы САУ .
Поведение САУ или любого ее звена в динамических режимах описывается уравнением динамики y(t) = F(u,f,t) , описывающее изменение величин во времени. Как правило, это дифференциальное уравнение или система дифференциальных уравнений. Поэтому основным методом исследования САУ в динамических режимах является метод решения дифференциальных уравнений . Порядок дифференциальных уравнений может быть довольно высоким, то есть зависимостью связаны как сами входные и выходные величины u(t), f(t), y(t) , так и скорости их изменения, ускорения и т.д. Поэтому уравнение динамики в общем виде можно записать так:
F(y, y’, y”,..., y (n) , u, u’, u”,..., u (m) , f, f ’, f ”,..., f (k) ) = 0 .
3.2. Линеаризация уравнения динамики
В общем случае уравнение динамики оказывается нелинейным, так как реальные звенья САУ обычно нелинейны. В целях упрощения теории нелинейные уравнения заменяют линейными, которые приблизительно описывают динамические процессы в САУ. Получаемая при этом точность уравнений оказывается достаточной для технических задач. Процесс преобразования нелинейных уравнений в линейные называется линеаризацией уравнений динамики . Рассмотрим сначала геометрическое обоснование линеаризации.
 В нормально функционирующей САУ
значение регулируемой и всех промежуточных величин незначительно отличается
от требуемых. В пределах малых отклонений все нелинейные зависимости между величинами,
входящими уравнение динамики, могут быть приближенно представлены отрезками
прямых линий. Например, нелинейная статическая характеристика звена на участке
АВ (рис.26) может быть представлена отрезком касательной в точке номинального
режима А"В". Начало координат переносится в точку О’, и в уравнениях
записываются не абсолютные значения величин y,u,f
, а их отклонения от
номинальных значений: y
= y - y н
, u
= u - u н
, f
= f - f н
. Это позволяет получить нулевые
начальные условия
, если считать, что при t
0
система находилась в номинальном режиме в состоянии покоя.
В нормально функционирующей САУ
значение регулируемой и всех промежуточных величин незначительно отличается
от требуемых. В пределах малых отклонений все нелинейные зависимости между величинами,
входящими уравнение динамики, могут быть приближенно представлены отрезками
прямых линий. Например, нелинейная статическая характеристика звена на участке
АВ (рис.26) может быть представлена отрезком касательной в точке номинального
режима А"В". Начало координат переносится в точку О’, и в уравнениях
записываются не абсолютные значения величин y,u,f
, а их отклонения от
номинальных значений: y
= y - y н
, u
= u - u н
, f
= f - f н
. Это позволяет получить нулевые
начальные условия
, если считать, что при t
0
система находилась в номинальном режиме в состоянии покоя.
Математическое обоснование линеаризации состоит в том, что если известно значение f(a) какой - либо функции f(x) в любой точке x = a , а также значения производных от этой функции в данной точке f’(a), f”(a), ..., f (n) (a) , то в любой другой достаточно близкой точке x + x значение функции можно определить, разложив ее в окрестности точки a в ряд Тейлора:
Аналогично можно разложить и функцию нескольких переменных. Для простоты возьмем упрощенный, но наиболее характерный вариант уравнения динамики САУ: F(y,y",y",u,u") = f. Здесь производные по времени u",y",y" также являются переменными. В точке, близкой к номинальному режиму: f = f н + f и F = F н + F . Разложим функцию F в ряд Тейлора в окрестности точки номинального режима, отбрасывая члены ряда высоких порядков малости:
В номинальном режиме, когда все отклонения и их производные по времени равны нулю, получаем частное решение уравнения: F н = f н . Учитывая это и вводя обозначения получим:
a o y” + a 1 y’ + a 2 y = b o u’ + b 1 u + c o f .
Отбрасывая все знаки , получим:
a o y” + a 1 y’ + a 2 y = b o u’ + b 1 u + c o f .
Отбрасывая все знаки , получим:
В более общем случае:
a o y (n) + a 1 y (n-1) + ... + a n - 1 y’ + a n y = b o u (m) + ... + b m - 1u’ + b m u + c o f.
При этом всегда нужно помнить, что в данном уравнении используются не абсолютные значения величин y, u, f их производных по времени, а отклонения этих величин от номинальных значений. Поэтому полученное уравнение будем называть уравнением в отклонениях .
К линеаризованной САУ можно применить принцип суперпозиции : реакция системы на несколько одновременно действующих входных воздействий равна сумме реакций на каждое воздействие в отдельности. Это позволяет звено с двумя входами u и f разложить на два звена, каждое из которых имеет один вход и один выход (рис.27). Поэтому в дальнейшем мы ограничимся изучением поведения систем и звеньев с одним входом, уравнение динамики которых имеет вид:
a o y (n) + a 1 y (n-1) + ... + a n - 1 y’ + a n y = b o u (m) + ... + b m - 1u’ + b m u.
 Это уравнение описывает САУ в динамическом
режиме лишь приближенно с той точностью, которую дает линеаризация. Однако следует
помнить, что линеаризация возможна только при достаточно малых отклонениях величин
и при отсутствии разрывов в функции F
в окрестностях интересующей нас
точки, которые могут быть созданы различными выключателями, реле и т.п.
Это уравнение описывает САУ в динамическом
режиме лишь приближенно с той точностью, которую дает линеаризация. Однако следует
помнить, что линеаризация возможна только при достаточно малых отклонениях величин
и при отсутствии разрывов в функции F
в окрестностях интересующей нас
точки, которые могут быть созданы различными выключателями, реле и т.п.
Обычно n m , так как при n < m САУ технически нереализуемы.
3.3. Передаточная функция
В ТАУ часто используют операторную форму записи дифференциальных уравнений. При этом вводится понятие дифференциального оператора p = d/dt так, что, dy/dt = py , а p n = d n /dt n . Это лишь другое обозначение операции дифференцирования. Обратная дифференцированию операция интегрирования записывается как 1/p . В операторной форме исходное дифференциальное уравнение записывается как алгебраическое:
a o p (n) y + a 1 p (n-1) y + ... + a n y = (a o p (n) + a 1 p (n-1) + ... + a n )y = (b o p (m) + b 1 p (m-1) + ... + bm )u
Не надо путать эту форму записи с операционным исчислением хотя бы потому, что здесь используются непосредственно функции времени y(t), u(t) (оригиналы ), а не их изображения Y(p), U(p) , получаемые из оригиналов по формуле преобразования Лапласа. Вместе с тем при нулевых начальных условиях с точностью до обозначений записи действительно очень похожи. Это сходство лежит в природе дифференциальных уравнений. Поэтому некоторые правила операционного исчисления применимы к операторной форме записи уравнения динамики. Так оператор p можно рассматривать в качестве сомножителя без права перестановки, то есть pyyp . Его можно выносить за скобки и т.п.
Поэтому уравнение динамики можно записать также в виде:
Дифференциальный оператор W(p) называют передаточной функцией . Она определяет отношение выходной величины звена к входной в каждый момент времени: W(p) = y(t)/u(t) , поэтому ее еще называют динамическим коэффициентом усиления . В установившемся режиме d/dt = 0 , то есть p = 0 , поэтому передаточная функция превращается в коэффициент передачи звена K = b m /a n .
Знаменатель передаточной функции D(p) = a o p n + a 1 p n - 1 + a 2 p n - 2 + ... + a n называют характеристическим полиномом . Его корни, то есть значения p, при которых знаменатель D(p) обращается в ноль, а W(p) стремится к бесконечности, называются полюсами передаточной функции .
Числитель K(p) = b o p m + b 1 p m - 1 + ... + b m называют операторным коэффициентом передачи . Его корни, при которых K(p) = 0 и W(p) = 0 , называются нулями передаточной функции .
Звено САУ с известной передаточной функцией называется динамическим звеном . Оно изображается прямоугольником, внутри которого записывается выражение передаточной функции. То есть это обычное функциональное звено, функция которого задана математической зависимостью выходной величины от входной в динамическом режиме. Для звена с двумя входами и одним выходом должны быть записаны две передаточные функции по каждому из входов. Передаточная функция является основной характеристикой звена в динамическом режиме, из которой можно получить все остальные характеристики. Она определяется только параметрами системы и не зависит от входных и выходных величин. Например, одним из динамических звеньев является интегратор. Его передаточная функция W и (p) = 1/p . Схема САУ, составленная из динамических звеньев, называется структурной .
3.4. Элементарные динамические звенья
Динамика большинства функциональных элементов САУ независимо от исполнения может быть описана одинаковыми по форме дифференциальными уравнениями не более второго порядка. Такие элементы называют элементарными динамическими звеньями . Передаточная функция элементарного звена в общем виде задается отношением двух полиномов не более чем второй степени:
W э (p) =
 .
.
Известно также, что любой полином произвольного порядка можно разложить на простые сомножители не более, чем второго порядка. Так по теореме Виета можно записать
D(p) = a o p n + a 1 p n - 1 + a 2 p n - 2 + ... + a n = a o (p - p 1 )(p - p 2 )...(p - p n ),
где p 1 , p2 , ..., p n - корни полинома D(p) . Аналогично
K(p) = b o pm + b 1 p m - 1 + ... + bm = b o (p - p ~ 1 )(p - p ~ 2 )...(p - p ~ m ), i 2 ).

Поэтому любую сложную передаточную функцию линеаризованной САУ можно представить как произведение передаточных функций элементарных звеньев. Каждому такому звену в реальной САУ, как правило, соответствует какой - то отдельный узел. Зная свойства отдельных звеньев можно судить о динамики САУ в целом.
В теории удобно ограничиться рассмотрением типовых звеньев
,
передаточные функции которых имеют числитель или знаменатель, равный единице,
то есть W(p) =
, W(p) =
 , W(p) = 1/p
, W(p)
= p
, W(p) = Tp + 1
, W(p) = k
. Из них могут быть образованы все
остальные звенья. Звенья, у которых порядок полинома числителя больше порядка
полинома знаменателя, технически нереализуемы.
, W(p) = 1/p
, W(p)
= p
, W(p) = Tp + 1
, W(p) = k
. Из них могут быть образованы все
остальные звенья. Звенья, у которых порядок полинома числителя больше порядка
полинома знаменателя, технически нереализуемы.
Вопросы
- Какой режим САУ называется динамическим?
- Что называется регулированием?
- Назовите возможные виды переходных процессов в САУ. Какие из них являются допустимыми для нормальной работы САУ?
- Что называется уравнением динамики? Каков его вид?
- Как провести теоретическое исследование динамики САУ?
- Что называется линеаризацией?
- В чем геометрический смысл линеаризации?
- В чем состоит математическое обоснование линеаризации?
- Почему уравнение динамики САУ называется уравнением в отклонениях?
- Справедлив ли для уравнения динамики САУ принцип суперпозиции? Почему?
- Как звено с двумя и более входами представить схемой, состоящей из звеньев с одним входом?
- Запишите линеаризованное уравнение динамики в обычной и в операторной формах?
- В чем смысл и какими свойствами обладает дифференциальный оператор p?
- Что называется передаточной функцией звена?
- Запишите линеаризованное уравнение динамики с использованием передаточной функции. Справедлива ли эта запись при ненулевых начальных условиях? Почему?
- Напишите выражение для передаточной функции звена по известному линеаризованному уравнению динамики: (0.1p + 1)py(t) = 100u(t).
- Что называется динамическим коэффициентом усиления звена?
- Что называется характеристическим полиномом звена?
- Что называется нулями и полюсами передаточной функции?
- Что называется динамическим звеном?
- Что называется структурной схемой САУ?
- Что называется элементарными и типовыми динамическими звеньями?
- Как сложную передаточную функцию разложить на передаточные функции типовых звеньев?
Алгоритмические звенья, которые описываются обыкновенными дифференциальными уравнениями первого и второго порядка, получили название типовых динамических звеньев .
Типовые динамические звенья являются основными составными частями алгоритмических структур непрерывных систем управления, знание их характеристик существенно облегчает анализ таких систем.
Классификацию удобно осуществить, рассматривая различные частные формы дифференциального уравнения:
|
 2Т 2
Статическое
2Т 2
Статическое
 -преобладают
-преобладают -преобладают
-преобладаютЗвенья, у которых
а 2
 0
и в 1
0
и в 1
 0
обладают статизмом, т.е. однозначной
связью между входной и выходной
переменными в статическом режиме. Звенья
– статические, или позиционные.
0
обладают статизмом, т.е. однозначной
связью между входной и выходной
переменными в статическом режиме. Звенья
– статические, или позиционные.
Звенья, у которых
2 из трех коэффициентов а 2
 0,
а 1
0,
а 1
 0,
а 0
0,
а 0
 0,
обладают инерционностью (замедлением).
0,
обладают инерционностью (замедлением).
У звеньев 1,5,7 только
2 коэффициента
 0.
Они являются простейшими, или элементарными.
Все остальные типовые звенья могут быть
образованы из элементарных путем
последовательного, параллельного и
встречно- параллельного соединения.
0.
Они являются простейшими, или элементарными.
Все остальные типовые звенья могут быть
образованы из элементарных путем
последовательного, параллельного и
встречно- параллельного соединения.
Апериодическое звено
Динамика процесса описывается следующим уравнением:

где k передаточный коэффициент или коэффициент усиления, Т постоянная времени, характеризующая инерционность звена.
1 .
Переходная характеристика:
.
Переходная характеристика:

1)

2) В точке ноль строят касательную переходной характеристики, определяют точку пересечения с линией k . Абсцисса этой точки и есть постоянная времени.
2. Импульсная переходная характеристика, или функция веса, звена может быть получена путем дифференцирования функции h (t ) :


3. Передаточная функция:
П


Структурная схема звена при этом будет выглядеть следующим образом:
Подставляя в передаточную функцию p = j , получим амплитудно-фазо-частотную функцию:


5 .
АЧХ:
.
АЧХ:
График АЧХ строится по точкам:


Здесь с – частота сопряжения.
Гармонические сигналы малой частоты ( < с ) пропускаются звеном хорошо – с отношением амплитуд выходной и входной величин, близким к передаточному коэффициенту k . Сигналы большой частоты ( > с ) плохо пропускаются звеном: отношение амплитуд существенно < коэффициента k . Чем больше постоянная времени Т , т.е. чем больше инерционность звена, тем меньше АЧХ вытянута вдоль оси частот, или, тем у же полоса пропускания частот.
Т.о. инерционное звено первого порядка по своим частотным свойствам является фильтром низкой частоты .
ФЧХ инерционного звена первого порядка равна:



Чем больше частота входного сигнала, тем больше отставание по фазе выходной величины от входной. Максимально возможное отставание равно 90 0 . При частоте с = 1/Т сдвиг фаз равен –45 0 .
Рассмотрим теперь ЛАЧХ звена. Точная ЛАЧХ описывается выражением:
При построении ЛАЧХ апериодического звена прибегают к асимптотическим методам или, другими словами, строят асимптотический график ЛАЧХ.

Значение сопрягающей частоты w c , при которой пересекаются обе асимптоты, найдем из условия


Посмотрим, что будет при построении не асимптотической, а точной ЛАЧХ:


Точная характеристика
(ЛАЧХ) в точке среза будет меньше
асимптотической ЛАЧХ на величину
 .
.
Существует так называемое неустойчивое апериодическое звено

Колебательное звено
Динамика процессов в колебательном звене описывается уравнением:
 ,
,
где k
коэффициент усиления звена; Т
постоянная времени колебательного
звена;

коэффициент демпфирования звена (или
коэффициент затухания).
коэффициент демпфирования звена (или
коэффициент затухания).
В зависимости от величины коэффициента демпфирования различают четыре типа звеньев:
а) колебательное
0< <1;
<1;
б) апериодическое
звено II
порядка >1;
>1;
в) консервативное
звено
 =0;
=0;
г) неустойчивое
колебательное звено
 <0.
<0.
1. Переходная характеристика колебательного звена:


А

 ,
или её можно найти, определив постоянную
времени экспоненты, с которой происходит
затухание
,
или её можно найти, определив постоянную
времени экспоненты, с которой происходит
затухание

Чем ближе коэффициент затухания к единице, тем меньше амплитуда колебаний, чем меньше Т , тем быстрее устанавливаются переходные процессы.


При >1 колебательное звено называется апериодическим звеном второго порядка (последовательное соединение двух апериодических звеньев с постоянными времени Т 1 и Т 2 ).
 ,
или можно записать так
,
или можно записать так
 .
.
Здесь
0
– величина, обратная постоянной времени
( );
);
 .
.
Такое звено в литературе называют консервативным звеном .


Все переходные характеристики будут колебаться вдоль величины k .
2. Импульсная переходная характеристика:






3



График АФЧХ будет
выглядеть следующим образом:

Это характеристика для колебательного звена и для апериодического звена второго порядка.
Для апериодического
звена -
 .
.

 -
-
АФЧХ для консервативного звена.
 .
.
А

 имеет максимум (резонансный пик), равный
имеет максимум (резонансный пик), равный
Отсюда видно, что, чем меньше коэффициент , тем больше резонансный пик.

Т



Для случая б) график будет аналогичным, только перегиб будет чуть меньше (штриховая линия на графике).


Где

Асимптотическая ЛАЧХ колебательного звена:

Определяем наклон на втором участке:
Шаблон к графику а) дается от 0 до 1 шагом в 0,1.
К



Структурная схема колебательного звена будет выглядеть следующим образом:


Примером колебательного звена является любая RLС- цепь.
Общие свойства статических звеньев
В установившемся режиме выходная переменная y однозначно связана с входной переменной x уравнением статики

Передаточный коэффициент звена связан с передаточной функцией соотношением


Звенья являются звеньями низкой частоты (кроме безынерционного), т.е. хорошо пропускают низкочастотные сигналы и плохо – высокочастотные, в режиме гармонических колебаний создают отрицательные фазовые сдвиги.


